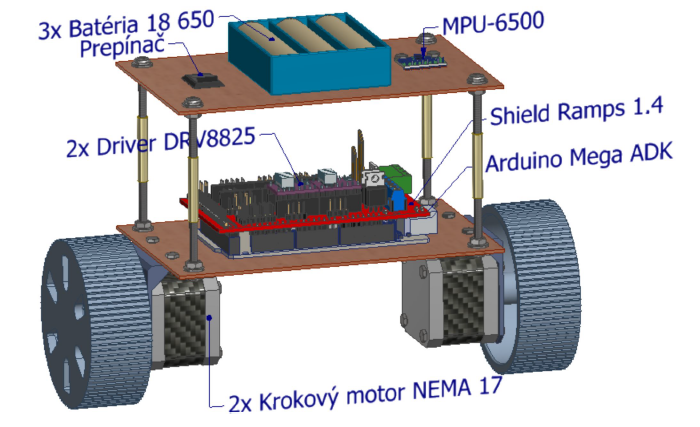
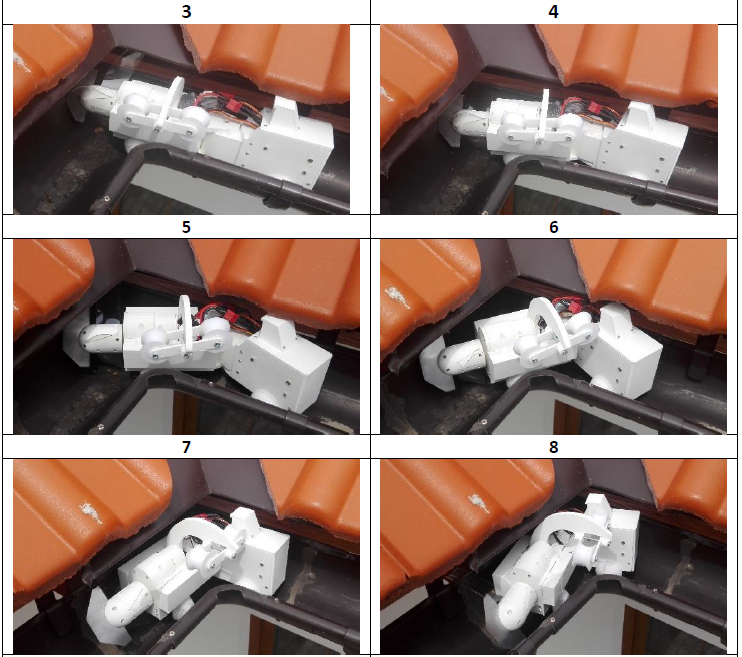
Daubner1 Publikováno 28. 4. 2022-Updated 28. 4. 2022-v rozměrech 700 × 427 v 2372121 Images navigation Previous Next Matúš Daubner: Návrh a implementace řízení inverzního robota
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}