
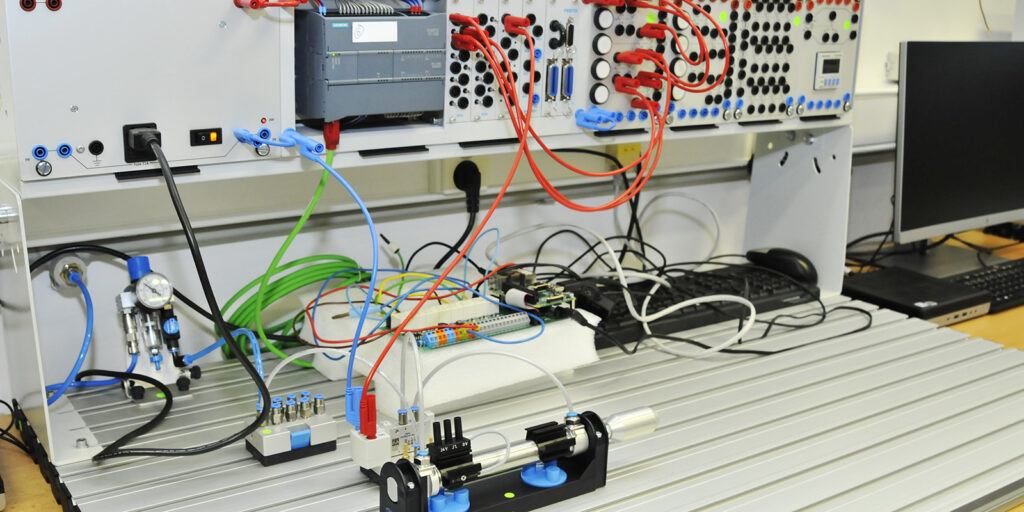

Laboratory of Programmable Logic Controller is a lab for the education and realization of student’s projects and diploma thesis in the field of programmable logic controllers.
Lab equipment
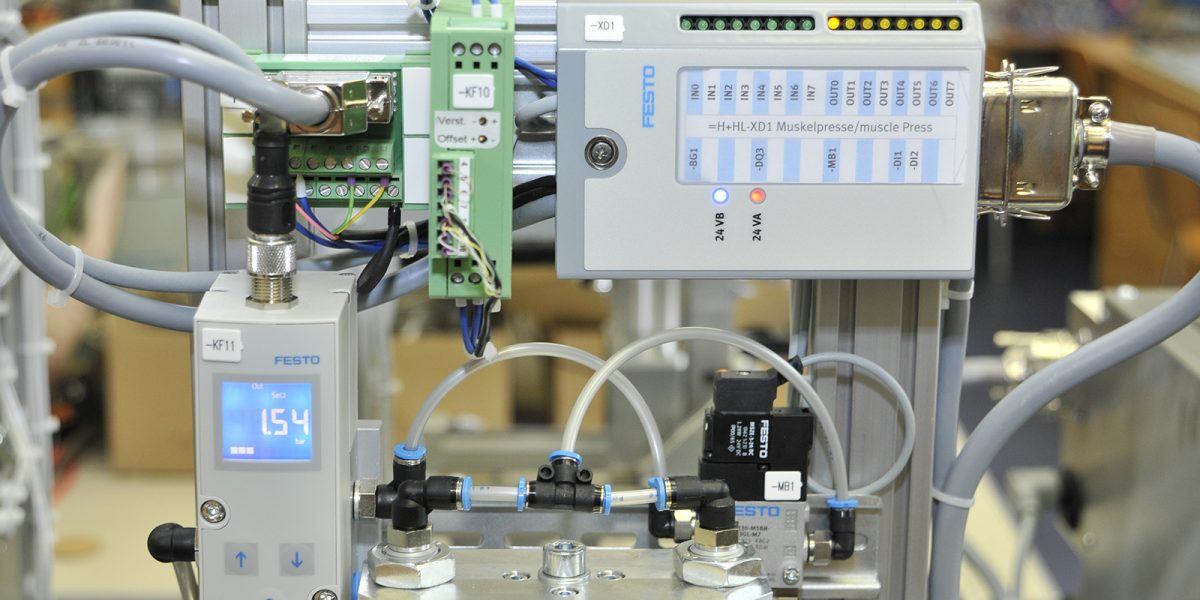
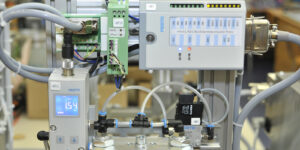
Field automation (industrials sensors, pneumatical and electro-pneumatical drives)
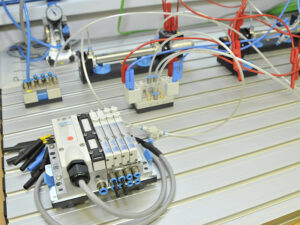

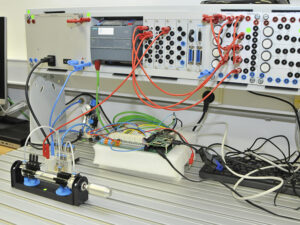
Programmable Logic Controllers (PLC)
Supervisory control and data acquisition (SCADA)

Manufacturing execution system (MES)
Equipment for the development and testing of the Human Machine Interfaces (HMI) using eye tracking and recording of biological indicators of the psychophysical state of the operator / dispatcher.

Youla-Kučera Parametrization for Periodic Regulation of Linear Time-Delay Systems
The paper presents a controller design method that adopts the well-known Youla-Kučera parameterization for linear time-invariant time-delay systems. In particular, through the use of the parameterization in a frequency-domain framework, an additional periodic disturbance rejection capability is brought to a readily available linear state-feedback controller without affecting its stabilizing feature […]
The State Final Examinations June 2026
The State Final Examinations will take place at the Department of Instrumentation and Control Engineering from June 23 to June 25, 2026. The examination schedule can be found in the attached PDF document.

Pavel Skopec Selected as a Finalist of the Antonín Svoboda Award for the Best Ph.D. Thesis 2025
Ing. Pavel Skopec, Ph.D., from the Department of Instrumentation and Control Engineering, Faculty of Mechanical Engineering, CTU in Prague, has achieved a significant academic success. His dissertation has been selected among the finalists of the national Antonín Svoboda Award for the Best Ph.D. Thesis 2025, announced by the Czech Society […]