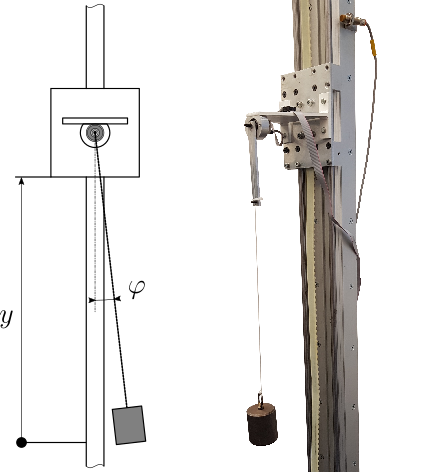
A complete mechatronic design of a minimal configuration brachiation robot is presented. The robot consists of a single rigid rod with gripper mechanisms attached to both ends. The grippers are used to hang the robot arm on a horizontal bar on which it swings or rotates. The motion is imposed by repositioning the robot’s center of mass, which is performed using a crank-slide mechanism. Based on a non-linear model, an optimal control strategy is proposed, for repositioning the center of mass in a bang-bang manner. Consequently, utilizing the concept of input-output linearization, a continuous control strategy is proposed that takes into account the limited torque of the crank-slide mechanism and its geometry. An increased attention is paid to energy accumulation towards the subsequent jump stage of the brachiation. These two strategies are first validated and compared in simulations. The continuous control strategy is then also implemented within a low-cost STM32-based control system, and both the swing and rotation stage of brachiation motion are experimentally validated.
The preliminary experiments have been performed at laboratories of Professor Ikuo Mizuuchi, Department of Mechanical Systems Engineering, Tokyo University of Agriculture and Technology, Tokyo, Japan.


{kind=link}