

The Automatic Control Laboratory is primarily intended for students of the basic Automatic Control course. They will become familiar with the principles of feedback control – they will practically try out how to determine the dynamic properties of a real system and then how to properly adjust the universal PID controller to control it. These tasks include, for example, controlling the position of the levitating ball or controlling the speed of rotation of a DC motor. In the automation laboratory, students will also try to solve real examples of logic control tasks using industrial Programmable Logic Controllers. For example, they can control railway barriers, operate the model of production line, maintain the water level in the tank, etc. The laboratory also serves students of our specialization, who within the subject Systems Identification practically verify the advantages and disadvantages of various methods of modeling real dynamic systems. For students of the second year of bachelor’s study, the Laboratory of Automation also runs a obligatory elective course Robot Control Introduction (currently in Czech language only), in which students learn in an entertaining way (teaching is designed as a competition of design teams) with the pitfalls of design and implementation of autonomous mobile robot.
You can found more information about the laboratory tasks in our Virtual Control Laboratory.
In addition to regular teaching, master and bachelor theses such as a postgraduate study scientific projects are continuously implemented in the Automatic Control Laboratory.
Lab equipment
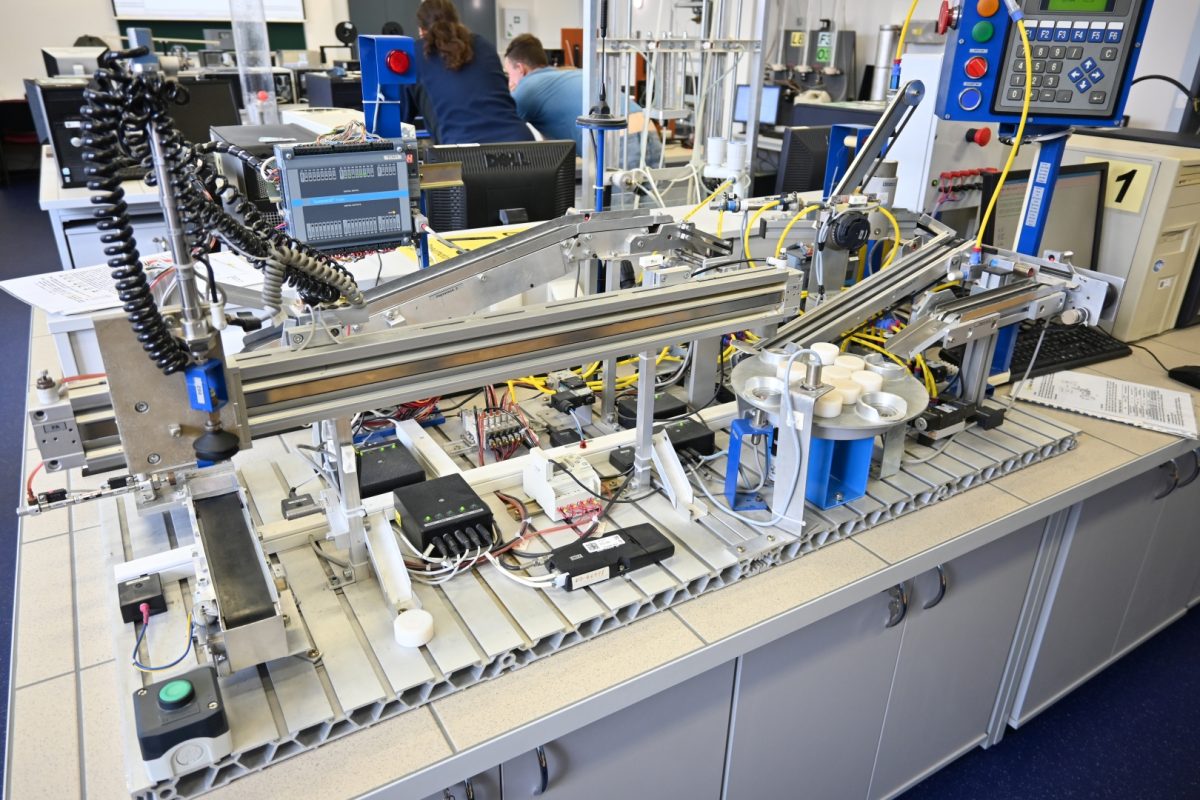
Logic control
Task description
The used control system is PLC Tecomat TC602. Its outputs control two motor of a rotating table and of two conveyor belts. PLC inputs sense the signals from optical proximity sensors sensing the presence of an object on the conveyor belt.
Continuous control (frequency characteristics)
Continuous control (feedback control)

Youla-Kučera Parametrization for Periodic Regulation of Linear Time-Delay Systems
The paper presents a controller design method that adopts the well-known Youla-Kučera parameterization for linear time-invariant time-delay systems. In particular, […]
The State Final Examinations June 2026
The State Final Examinations will take place at the Department of Instrumentation and Control Engineering from June 23 to June […]

Pavel Skopec Selected as a Finalist of the Antonín Svoboda Award for the Best Ph.D. Thesis 2025
Ing. Pavel Skopec, Ph.D., from the Department of Instrumentation and Control Engineering, Faculty of Mechanical Engineering, CTU in Prague, has […]