A combination of analytical and numerical time-delay-system spectrum-shaping tools are applied to the design of the robust delayed resonator. First, the delayed resonator model is turned into a dimension-less form with the objective to generalize the derived results. The main theoretical result is then provided as a complete parameterization of the proposed resonator feedback with two delay terms to assign a pair of roots with multiplicity two on the imaginary axis. In the frequency-domain, the double roots are projected to widening the stop-band in the active absorber frequency response, which increases its robustness in vibration suppression. On the other hand, they have a destabilizing effect on the overall system dynamics. The stabilization is subsequently performed by an additional controller via spectral optimization. The design is thoroughly validated by both simulations and experiments where the results are compared with the classical delayed resonator.
You may also like

A fully analytical controller design is proposed to tackle a periodic control problem for stable linear systems with an input delay. Applying […]
In this article, a control design method is presented for stability optimization of time-delay systems combined with cancellation of vibration frequencies at […]

{kind=link}
{kind=link}
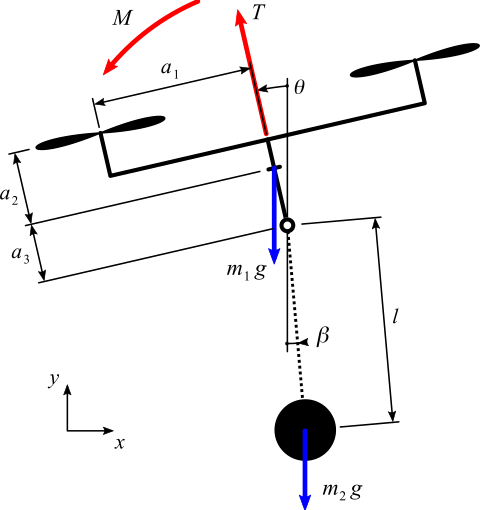
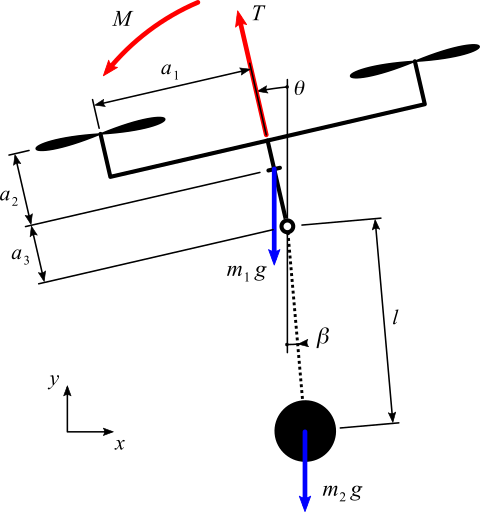
A control design and numerical study is presented for the problem of maneuvering a quadcopter with suspended load. An inverse shaper with a […]