In this article, a control design method is presented for stability optimization of time-delay systems combined with cancellation of vibration frequencies at a desired target location. The method is applied to non-collocated vibration suppression of flexible multibody systems wherein, an entire suppression of vibrations at a target mass located at a position distant from the absorber is recast into a problem of assigning zeros of the transfer function from the external excitation frequency to position of the target mass. The requirement of achieving sufficient damping in the closed-loop system combined with suppressing vibrations at the target leads to a problem of minimization of the spectral abscissa function subject to zero-location constraints. The constraints exhibit polynomial dependence on the controller parameter and are therefore difficult to eliminate directly. We present two approaches, both based on constraint elimination followed by the application of an algorithm for non-smooth unconstrained optimization and detail a set of algebraic conditions for performing elimination. This design approach is applicable to delay-free models as well as time-delay models of retarded type. Finally, the methodology is verified by performing a simulation of a spring-mass-damper system following which, it is validated experimentally on a laboratory setup. The successful experimental validation demonstrates the applicability of the method for actual systems.
You may also like
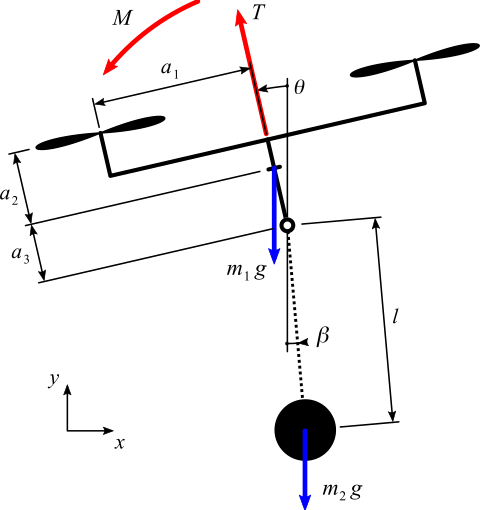
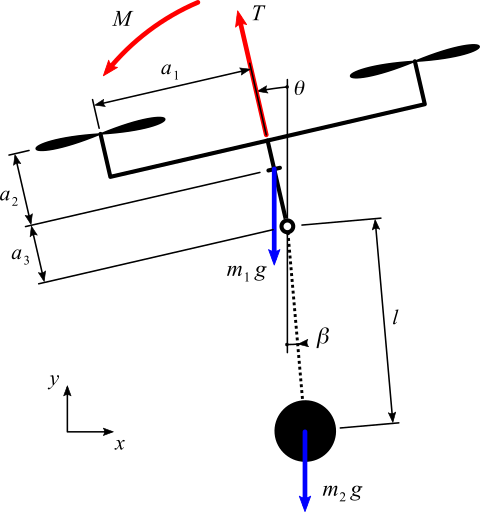
A control design and numerical study is presented for the problem of maneuvering a quadcopter with suspended load. An inverse shaper with a […]

A fully analytical controller design is proposed to tackle a periodic control problem for stable linear systems with an input delay. Applying […]
The paper [1] deals with damping the oscillations of a suspended payload by adjusting the length of the cable. After revising existing […]
{kind=link}
{kind=link}
A complete mechatronic design of a minimal configuration brachiation robot is presented. The robot consists of a single rigid rod with gripper […]