Solution of a case study problem of suspended payload sway damping by moving a pivot base in vertical direction is presented. Unlike for the classical problem of anti-sway control for moving the base in the horizontal direction, implemented e.g. in cranes, a direct solution by linear system theory is not possible. This is due to the fact that once the model is linearised, it becomes uncontrollable. Thus, a derivation of a nonlinear controller is needed to perform the task. Two solutions are proposed. The first solution is based on imposing harmonic motion of the base with double frequency of the payload natural frequency. Synchronization of the base and the payload deflection angle is done either by proportional time delay controller or by proportional-derivative delay free controller. Secondly, Lyapunov control theory is directly applied to derive a nonlinear controller. For both the cases, balancing the dissipated energy, rules for determining equivalent damping are derived. After discussing and solving implementation aspects, both simulation and experimental validations are performed. The experimental validation is performed on a simplified problem, where only horizontal motion is possible. The simulation based validation is performed on a nonlinear two dimensional model of a quad-copter carrying a suspended payload.
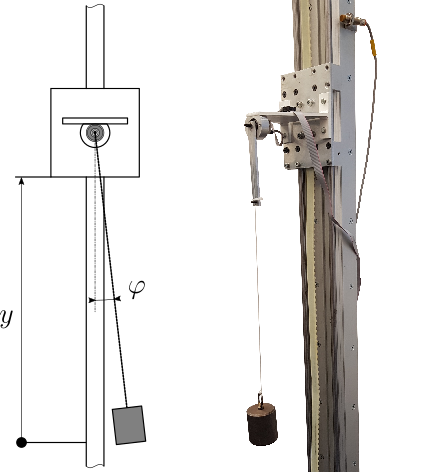
Fig. 2: Experimental demonstration of free oscillations of the payload without dampind and with damping ξ = [0.05, 0.10].
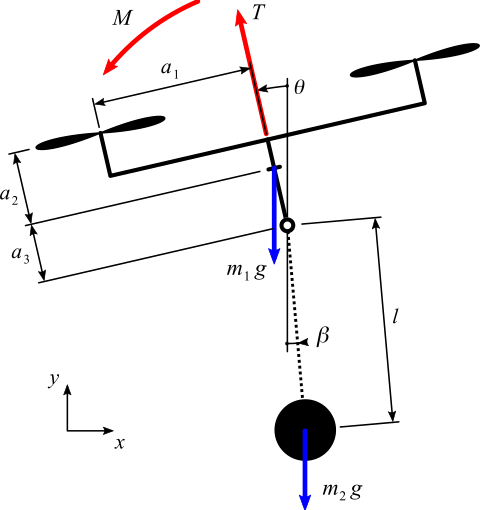
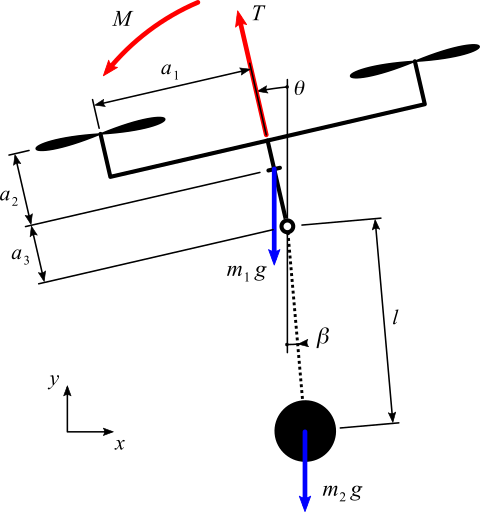
Fig. 3: Simulation based demonstration of suspended payload sway damping by moving copter platform for ξ = 0.20.
References
Matěj Kuře, Jaroslav Bušek, Tomáš Vyhlídal, Silviu-Iulian Niculescu, Algorithms for cable-suspended payload sway damping by vertical motion of the pivot base, Mechanical Systems and Signal Processing, Volume 149, 2021, 107131, ISSN 0888-3270, https://doi.org/10.1016/j.ymssp.2020.107131.
Matěj Kuře, Jaroslav Bušek, Tomáš Vyhlídal, Silviu-Iulian Niculescu, Damping oscillation of suspended payload by up and down motion of the pivot base – time delay algorithms for UAV applications, IFAC-PapersOnLine, Volume 52, Issue 18, 2019, Pages 121-126, ISSN 2405-8963, https://doi.org/10.1016/j.ifacol.2019.12.217.

{kind=link}
{kind=link}