The paper [1] deals with damping the oscillations of a suspended payload by adjusting the length of the cable. After revising existing approaches, nonlinear time-delay feedback is proposed to handle efficiently the given task. Alike the existing approaches, the Coriolis force is generated by synchronizing translational and rotational motion so that the pendulum oscillations are damped. The main benefits of the proposed method are the low complexity of the feedback scheme and improved synchronization properties resulting from the feedback nature of the algorithm.

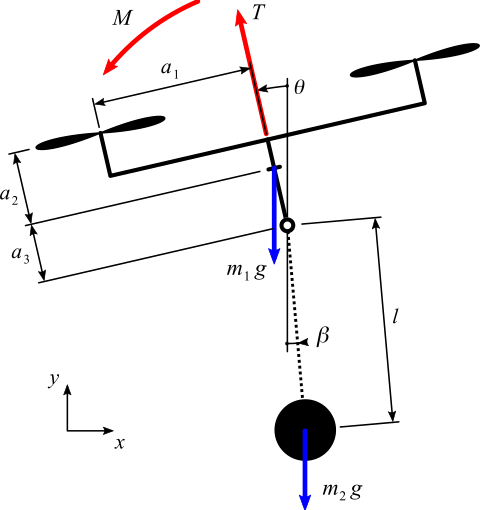
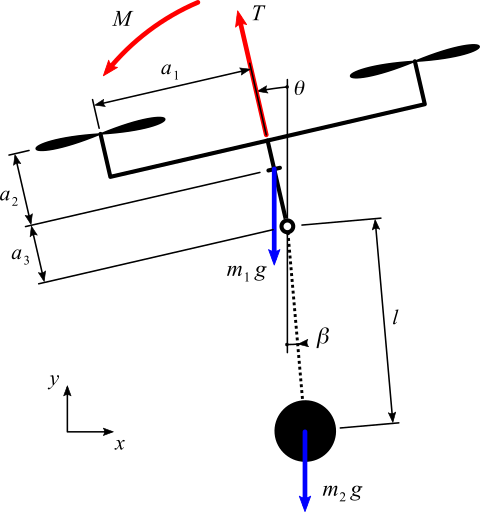
Fig. 1: Design scheme of the suspended payload with the adjustment of a cable length by controlling position of a cart
Fig. 2: Demonstration of free oscillations of the payload with the damping ξ = 0.001.
Fig. 3: Oscillation suppression by the proposed method with predefined damping ξ = 0.01. Notice that considerable reduction of settling time has been achieved just by slight adjustments of the rope length compared to the free oscillations.
Fig. 4: Oscillation suppression by the proposed method with predefined damping ξ=0.03. Notice that distraction of the oscillation period by catching and holding the payload for a while does not affect quality of the controlled damping. This is the key benefit of the proposed feedback scheme compared to existing open loop approaches reviewed in [1].
Fig. 5: Oscillation suppression by the proposed method with predefined damping ξ=0.05. Algorithm performs well also for this setting. On the one hand, it provides shorter settling time. On the other hand, the adjustment of the length is not that smooth.
Fig. 6: Oscillation suppression by the proposed method with predefined damping ξ=0.07. Algorithm performs well also for this setting. The amplitudes of the rope length oscillations are relatively large, but the settling time is shorter compared to the previous case. This is probably the maximum damping for which the overall nonlinear time delayed closed loop is safely stable.
Fig. 7 Oscillation suppression by the proposed method with predefined damping ξ=0.1. Algorithm damps the oscillations, but the amplitudes of oscillations are so large that the stability is lost at the second attempt.
References
[1] Vyhlídal, T., Anderle, M., Bušek, J., & Niculescu, S. I. (2017). Time delay algorithms for damping oscillations of suspended payload by adjusting the cable length. IEEE/ASME Transactions on Mechatronics. DOI: 10.1109/TMECH.2017.2736942


{kind=link}
{kind=link}