You may also like

Matěj Kuře, Adam Peichl, Jaroslav Bušek, Nejat Olgac, Tomáš Vyhlídal Non-collocated vibration absorption (NCVA) concept using delayed resonator for in-setup tuning is […]
The paper [1] deals with damping the oscillations of a suspended payload by adjusting the length of the cable. After revising existing […]
{kind=link}
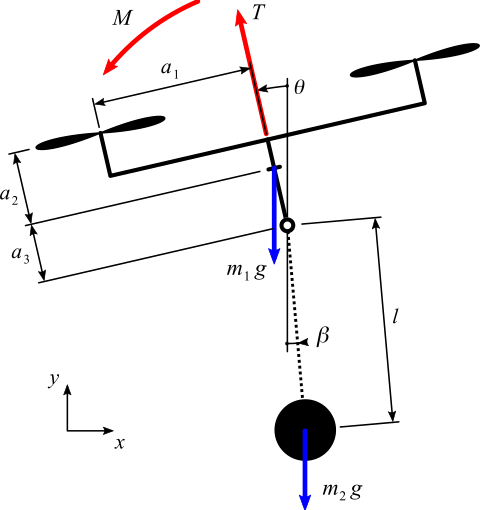
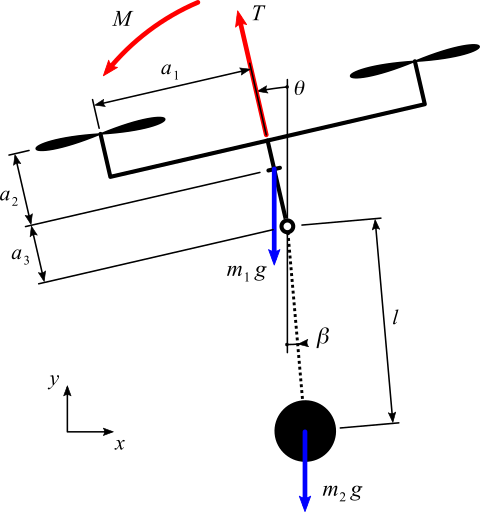
A control design and numerical study is presented for the problem of maneuvering a quadcopter with suspended load. An inverse shaper with a […]
In this article, a control design method is presented for stability optimization of time-delay systems combined with cancellation of vibration frequencies at […]