O PROJEKTU
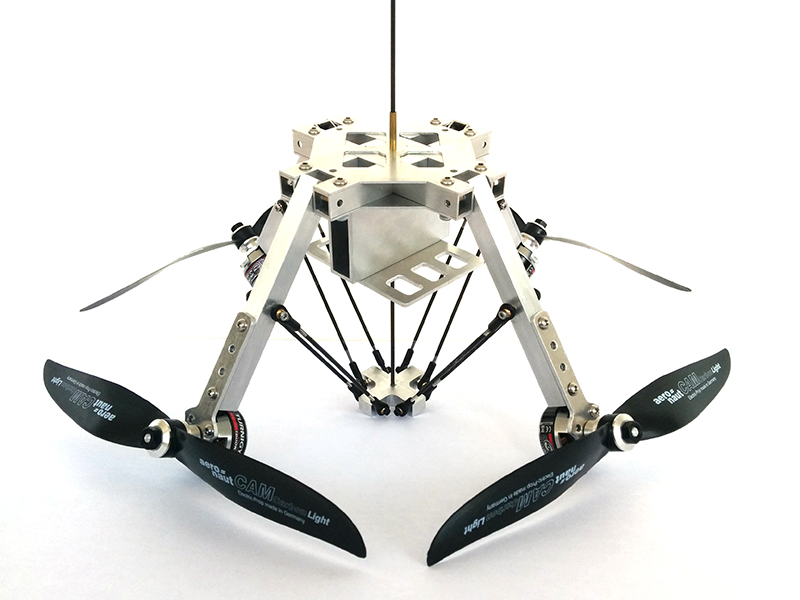
Cílem projektu je návrh původních algoritmů řízení pro novou generaci moderních, autonomně či dálkově ovládaných vrtulových bezpilotních prostředků (kvadrokoptér, multikoptér, dronů) s vysokou mírou flexibility a to jak bezpilotních prostředků samotných, tak zejména v jejich spojení s přenášenými (zavěšenými) břemeny.
Původnost navrhovaného společného výzkumu s pracovištěm Georgia Institute of Technology (GATECH) spočívá zejména v široké aplikaci metod tvarování signálů ve zpětných vazbách systému řízení a to v kombinaci se zpětnovazebními algoritmy pro potlačení působících externích poruch. Primárním cílem je výrazně zlepšit manévrovatelnost a zajistit robustní stabilitu celkového systému – bezpilotního prostředku se zavěšeným či flexibilně upevněným břemenem. Tohoto cíle bude dosaženo zejména kompenzací kmitavých módů soustavy aplikací tvarovačů signálu se zpožděními. Dále bude kladen důraz na robustnost řídicího systému vzhledem k časově proměnným zpožděním zpětných vazeb systému (výpočetní zpoždění, komunikační zpoždění, atd.). Potřeba řešení této problematiky vyvstává z aktuálního a populárního trendu praktického využití pilotovaných i bezpilotních prostředků pro přenos nákladů s co možná největší efektivitou a přesností.
ŘEŠITEL
prof. Ing. Tomáš Vyhlídal, PhD.
VÝSLEDKY
- Algorithms for payload sway damping by vertical motion of the pivot base
- Control design with inverse feedback shaper for quadcopter with suspended load
UKÁZKY


{kind=link}
{kind=link}