Cílem je tvorba zcela nové laboratorní úlohy zejména pro předmět Technická měření (bakalářské studium, 3. ročník, ročně cca CZ 250 studentů + cca 30 EN). Bude ukázána funkce aktivně řízeného magnetického ložiska a s ohledem na zaměření předmětu na použití senzorů ve strojírenství zejména měření polohy rotujícího objektu ve dvou osách různými typy senzorů (např. induktanční, kapacitní, vířivé proudy, optický), kterými bude úloha osazena.
Účelem je rozvoj kompetencí v oblasti senzoriky, tak aby student rozuměl, jak senzory použít, jak pracovat s jejich signálem, kdy je určitý princip vhodný/nevhodný a jaká má senzor omezení. Tyto znalosti může student využít např. při konstrukci strojů, kterými se bude jako absolvent zabývat. Automatizace představuje velice rozvíjenou disciplínu, např. v rámci iniciativy Průmysl 4.0, kompetence v této oblasti jsou velice žádané a požadované od zaměstnavatelů po našich absolventech. Konstruktérovi, strojaři, téměř jakéhokoliv stroje nestačí jen udělat správně mechaniku (i když bez té to samozřejmě nejde) ale téměř každá konstrukce obsahuje senzory různých veličin, pohony, řídicí systémy, atd., které je třeba také správně použít, aby stroj byl vůbec funkční a splňoval předepsané požadavky na svou funkci.
IDENTIFIKACE
Vnitřní soutěž PPSR 2022
ŘEŠITEL
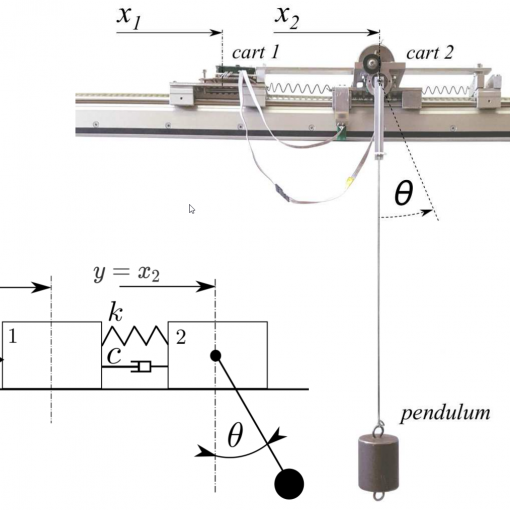
Popis úlohy
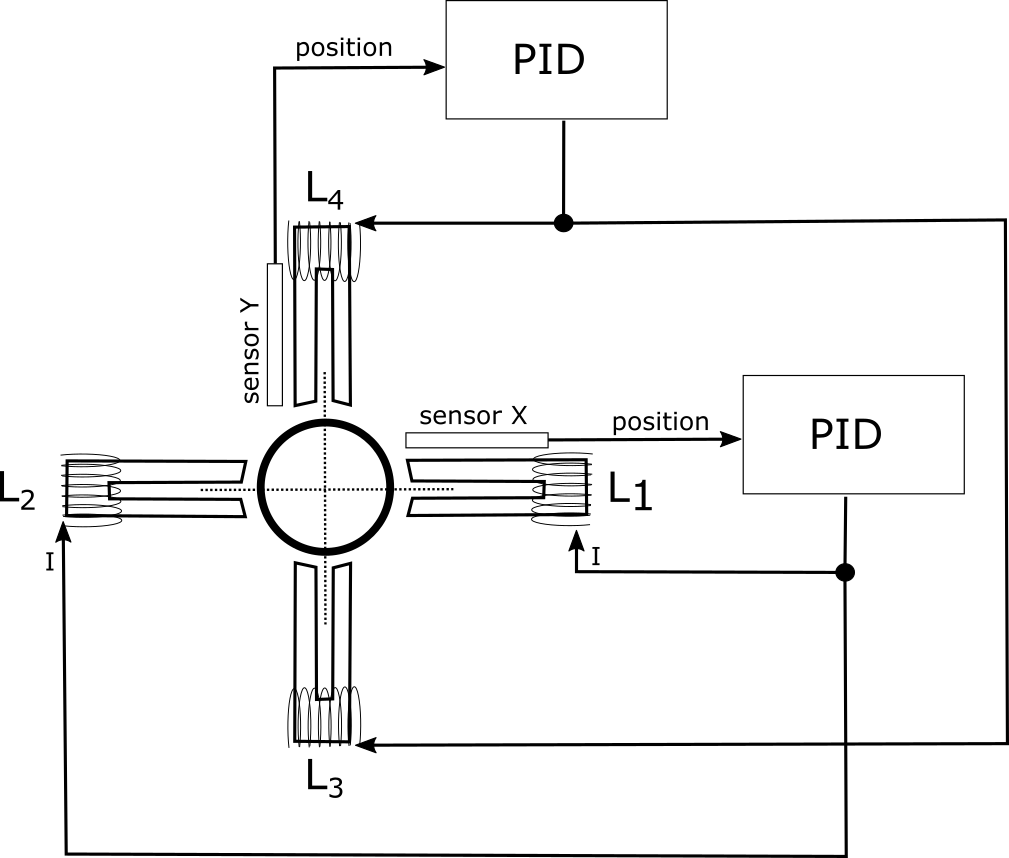
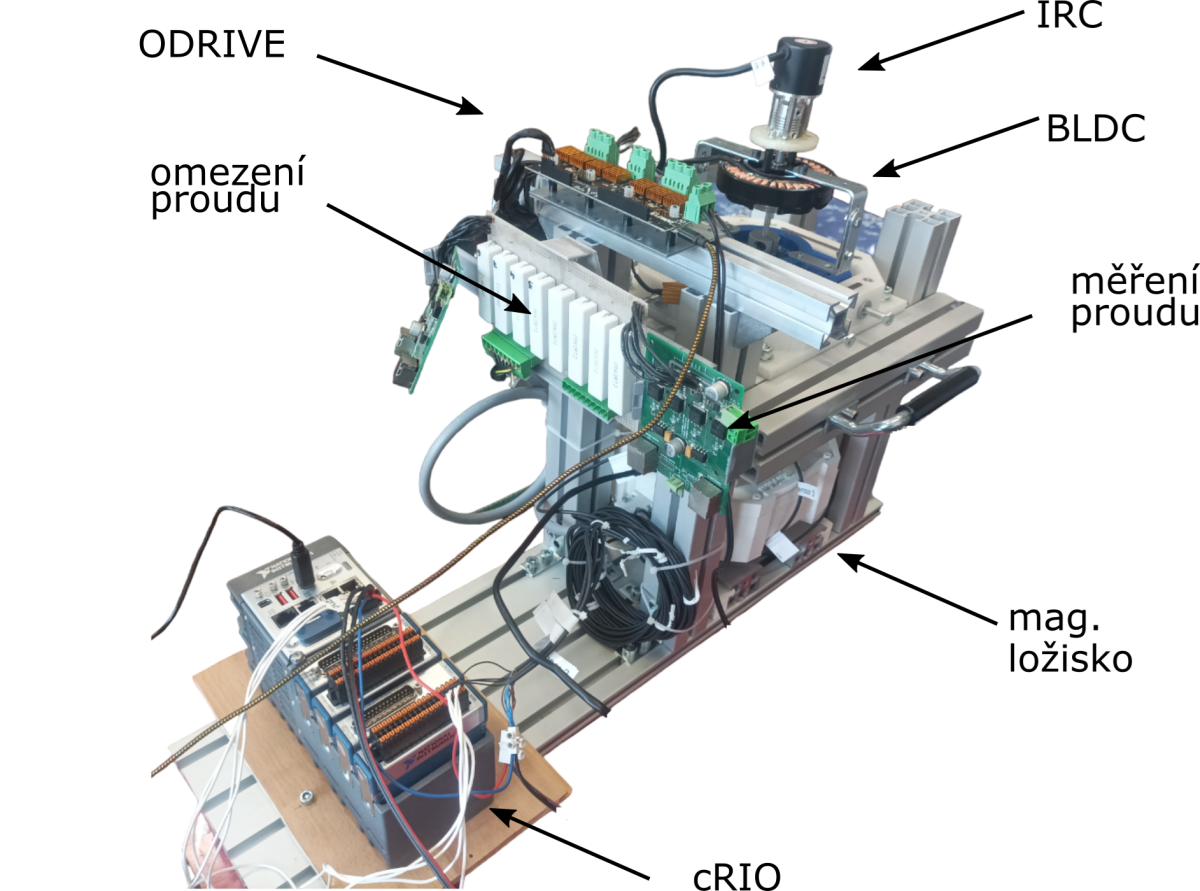
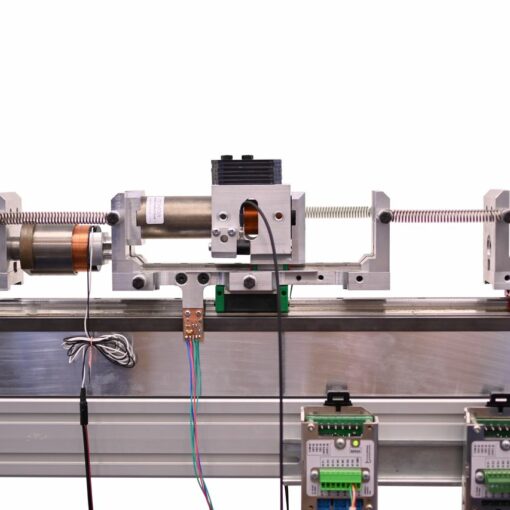
- Na této úloze si ukážeme celou řadu snímačů polohy. Princip aktivního magnetického ložiska je následující. Snímači polohy měříme aktuální polohu hřídele, ve dvou vzájemně kolmých osách. V této úloze jsou použité spojité indukční snímače polohy a dále optické snímače vzdálenosti. Na základě změřené polohy řídíme proudy v cívkách ložiska, které magneticky přitahují hřídel tak, aby zůstávala v požadované poloze, ve středu ložiska. Foto úlohy je na obrázku 1, schematicky je aktivní magnetické ložisko znázorněné na obrázku 2. Pro otáčení je použit třífázový BLDC motor s vektorovým řízením. Tento algoritmus řízení motoru vyžaduje snímač natočení hřídele, motor je osazen inkrementálním snímačem polohy. Řízení je zajištěno deskou ODrive. Vizualizace a řízení úlohy je zajištěná systémem CompactRIO a programem v LabView.
{kind=link}
{kind=link}
{kind=link}
{kind=link}