Projekty
23 posts



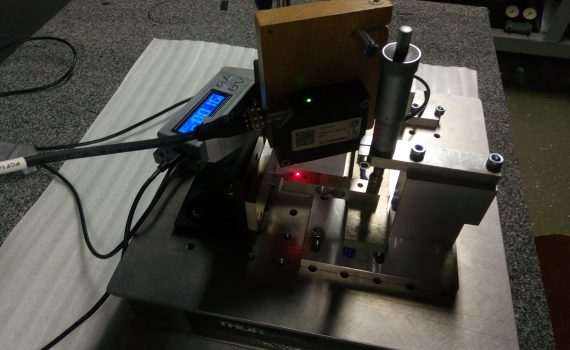


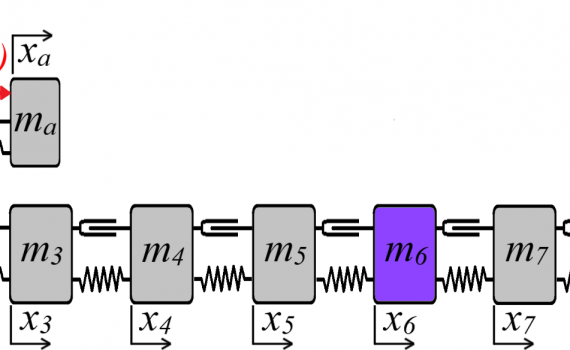
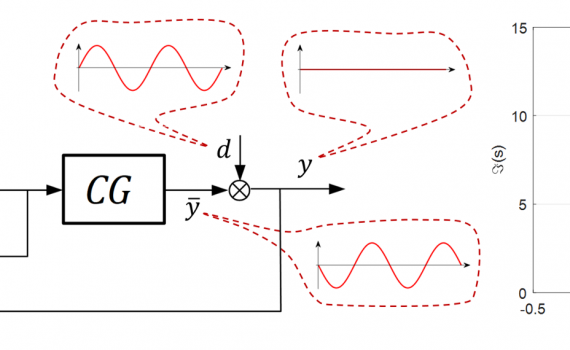
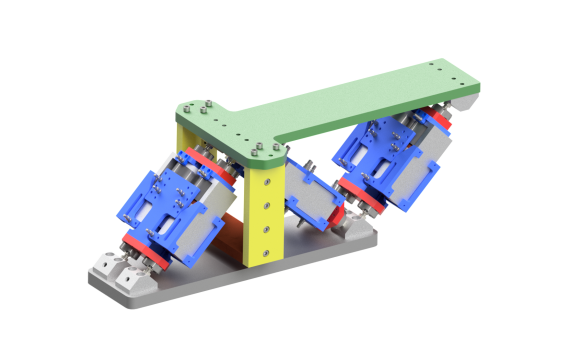
Projekt je zaměřen na návrh původní metodiky pro potlačení vibrací mechanických soustav s využitím aktivních hltičů jako klíčových prvků. Původnost spočívá v umístění hltičů v určité vzdálenosti od místa na soustavě, kde má dojít k potlačení vibrací. Tento koncept tzv. “nekolokovaného potlačení vibrací” má vysoký aplikační potenciál, např. v robotických a výrobních systémech. Jedná se zejména o aplikace, kde z technologických důvodů nemůže být hltič umístěn tradičním “kolokovaným“ způsobem. Toto výhodné řešení však dramaticky zvyšuje nároky na syntézu řízení a optimalizaci mechatronického systému. Spolu s hltičem je do hlcení vibrací totiž zapojena i část samotné soustavy. Daný problém komplexního charakteru je řešen s využitím pokročilých metod strukturální analýzy a optimalizované syntézy řízení v aplikaci jak na jednorozměrné, tak i vícerozměrné tlumení vibrací. Následně jsou stanoveny postupy pro optimalizaci mechatronické implementace teoreticky navržených úloh. Dosažené výsledky jsou validovány na komplexních simulačních modelech i na experimentálních demonstrátorech.